回归算法最小角回归(LARS)通过高维数据的线性组合提供变量。
它与正向逐步回归有关。在这种方法中,在每个步骤中选择最相关的变量,其方向在两个预测因子之间是等角的。
在本教程中,我们将学习如何用Python中的LARS和Lasso Lars算法拟合回归数据。LARS算法是一种用于回归分析的算法,它可以处理高维数据,并且能够自动选择最重要的特征。Lasso Lars算法是LARS算法的变种,它引入了L1正则项,以减少模型的复杂度和防止过拟合。在本教程中,我们将使用Python中的statsmodels库来实现LARS和Lasso Lars算法。我们将首先加载住房数据集,然后使用LARS和Lasso Lars算法对数据进行拟合。最后,我们将比较这两个算法的结果,并讨论它们的优缺点。我们将在本教程中估计住房数据集。这篇文章包括
可下载资源
作者

- 准备数据
- 如何使用LARS
- 如何使用Lasso LARS
让我们从加载所需的包开始。
from sklearn import linear_model准备数据
我们将加载波士顿的数据集,并将其分成训练和测试两部分。
boston = load_boston()
xtrain, xtest, ytrain, ytest=train\_test\_split(x, y, test_size=0.15)如何使用LARS
我们将用Lars()类定义模型(有默认参数),并用训练数据来拟合它。
Lars().fit(xtrain, ytrain)并检查模型的系数。
print(lars.coef_)
\[-1.16800795e-01 1.02016954e-02 -2.99472206e-01 4.21380667e+00
-2.18450214e+01 4.01430635e+00 -9.90351759e-03 -1.60916999e+00
-2.32195752e-01 2.80140313e-02 -1.08077980e+00 1.07377184e-02
-5.02331702e-01\]
接下来,我们将预测测试数据并检查MSE和RMSE指标。
mean\_squared\_error(ytest, ypred)
print("MSE: %.2f" % mse)
MSE: 36.96
print("RMSE: %.2f" % sqrt(mse))
RMSE: 6.08最后,我们将创建绘图,使原始数据和预测数据可视化。
plt.show()如何使用Lasso Lars
LassoLars是LARS算法与Lasso模型的一个实现。我们将用LassoLars()类定义模型,将α参数设置为0.1,并在训练数据上拟合模型。
LassoLars(alpha =.1).fit(xtrain, ytrain)我们可以检查系数。
print(coef_)
\[ 0. 0. 0. 0. 0. 3.00873485
0. 0. 0. 0. -0.28423008 0.
-0.42849354\]接下来,我们将预测测试数据并检查MSE和RMSE指标。
predict(xtest)
print("MSE: %.2f" % mse)
MSE: 45.59
print("RMSE: %.2f" % sqrt(mse))
RMSE: 6.75最后,我们将创建绘图,使原始数据和预测数据可视化。
plt.show()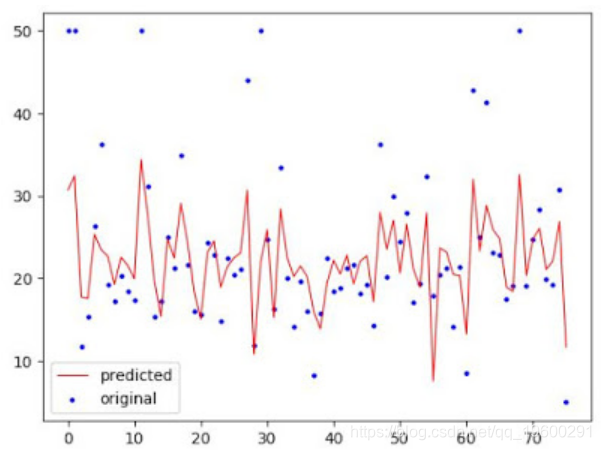
随时关注您喜欢的主题
在本教程中,我们已经简单了解了如何用LARS和Lasso Lars算法来拟合和预测回归数据。
参考文献
- Least Angle Regression, by Efron Bradley; Hastie Trevor; Johnstone Iain; Tibshirani Robert (2004)
- Least-Angel Regression, Wikipedia
 Python信贷冷启动信用风险评估:WOE编码、IV筛选、代价敏感学习与逻辑回归稀疏样本建模 | 附代码数据
Python信贷冷启动信用风险评估:WOE编码、IV筛选、代价敏感学习与逻辑回归稀疏样本建模 | 附代码数据 Python多尺度加权GOPAE-SVM-RF-GBT融合模型的高速列车轴承振动数据故障诊断与迁移学习可解释性分析|附代码数据
Python多尺度加权GOPAE-SVM-RF-GBT融合模型的高速列车轴承振动数据故障诊断与迁移学习可解释性分析|附代码数据 Python与CatBoost的顾客婚姻状态预测填补及特征类型策略分析 | 附代码数据
Python与CatBoost的顾客婚姻状态预测填补及特征类型策略分析 | 附代码数据 Python和Lag-Llama金融时序预测收益率零样本与微调对比回测实证研究|附代码数据
Python和Lag-Llama金融时序预测收益率零样本与微调对比回测实证研究|附代码数据