Stan是一种用于指定统计模型的概率编程语言。Stan通过马尔可夫链蒙特卡罗方法(例如No-U-Turn采样器,一种汉密尔顿蒙特卡洛采样的自适应形式)为连续变量模型提供了完整的贝叶斯推断。
可以通过R使用rstan 包来调用Stan,也可以 通过Python使用 pystan 包。这两个接口都支持基于采样和基于优化的推断,并带有诊断和后验分析。
在本文中,简要展示了Stan的主要特性。还显示了两个示例:第一个示例与简单的伯努利模型相关,第二个示例与基于常微分方程的Lotka-Volterra模型有关。
可下载资源
什么是Stan?
- Stan是命令式概率编程语言。
- Stan程序定义了概率模型。
- 它声明数据和(受约束的)参数变量。
- 它定义了对数后验。
- Stan推理:使模型拟合数据并做出预测。
- 它可以使用马尔可夫链蒙特卡罗(MCMC)进行完整的贝叶斯推断。
- 使用变分贝叶斯(VB)进行近似贝叶斯推断。
- 最大似然估计(MLE)用于惩罚最大似然估计。
先验概率与后验概率
1、先验概率 – 定义:直观理解,所谓“先”,就是在事情之前,即在事情发生之前事情发生的概率。是根据以往经验和分析得到的概率。 – 例子:比如抛硬币,我们都认为正面朝上的概率是0.5,这就是一种先验概率,在抛硬币前,我们只有常识。这个时候事情还没发生,我们进行概率判断。所谓的先验概率是对事情发生可能性猜测的数学表示
2、后验概率 – 定义:事情已经发生了,事情发生可能有很多原因,判断事情发生时由哪个原因引起的概率。 – 例子:比如今天你没去学校,原因有两个,可能是生病了,也可能是自行车坏了。然后上课时老师发现你没来。(这里是一个结果,就是你没来学校这件事情已经发生了)老师叫同学计算一下概率,分别是因为生病了没来学校的概率和自行车坏了没来学校的概率。
贝叶斯定理
开始谈贝叶斯定理之前,必须首先从条件概率 (conditional probability) 说起。所谓条件概率,就是在一个事件发生的情况下,去判断另一个相关联的事件发生的概率,或者简单说,就是指在事件 B 发生的情况下,事件 A 发生的概率。通常记为 P(A|B) 。接下来对贝叶斯公式做一个简单的推导,根据概率知识,我们可以求得 P(A|B) 为:
同理可得:
所以可以得到:
最终可以得到大名鼎鼎的贝叶斯公式:
实例、偷窃与狗吠
住在一座别墅里的一家人,在过去的 20 年中,发生了 2 次盗窃,这家人养了一只狗,这只狗平均每周晚上叫 3 次,而且,当发生盗窃时,这只狗会叫的概率是 0.9,那么问题是:在这只狗叫的情况下,发生盗窃的概率是多少?
我们假设 A 事件是狗晚上叫,则 P(A) = 3/7 ,假设 B 事件是发生盗窃,则P(B) = 2/365*20 。我们还知道,当 B 事件发生的条件下,A 事件发生的概率 P(A|B) = 0.9 。因此,根据贝叶斯公式,我们推断得到,狗叫时,发生盗窃的概率,即:
Stan计算什么?
- 得出后验分布 。
- MCMC采样。
- 绘制顺序
 ,其中每个绘制
,其中每个绘制 都按后验概率
都按后验概率 的边缘分布。
的边缘分布。 - 使用直方图,核密度估计等进行绘图
安装 rstan
要在R中运行Stan,必须安装 rstan C ++编译器。在Windows上, Rtools 是必需的。
最后,安装 rstan:
install.packages(rstan)Stan中的基本语法
视频
R语言中RStan贝叶斯层次模型分析示例
定义模型
Stan模型由六个程序块定义 :
- 数据(必填)。
- 转换后的数据。
- 参数(必填)。
- 转换后的参数。
- 模型(必填)。
- 生成的数量。
数据块读出的外部信息。
data {
int N;
int x[N];
int offset;
}变换后的数据 块允许数据的预处理。
transformed data {
int y[N];
for (n in 1:N)
y[n] = x[n] - offset;
}参数 块定义了采样的空间。
parameters {
real<lower=0> lambda1;
real<lower=0> lambda2;
}变换参数 块定义计算后验之前的参数处理。
transformed parameters {
real<lower=0> lambda;
lambda = lambda1 + lambda2;
}在 模型 块中,我们定义后验分布。
model {
y ~ poisson(lambda);
lambda1 ~ cauchy(0, 2.5);
lambda2 ~ cauchy(0, 2.5);
}最后, 生成的数量 块允许进行后处理。
generated quantities {
int x_predict;
x_predict = poisson_rng(lambda) + offset;
}类型
Stan有两种原始数据类型, 并且两者都是有界的。
- int 是整数类型。
- real 是浮点类型。
int<lower=1> N;
real<upper=5> alpha;
real<lower=-1,upper=1> beta;
real gamma;
real<upper=gamma> zeta;实数扩展到线性代数类型。
vector[10] a; // 列向量
matrix[10, 1] b;
row_vector[10] c; // 行向量
matrix[1, 10] d;整数,实数,向量和矩阵的数组均可用。

real a[10];
vector[10] b;
matrix[10, 10] c;Stan还实现了各种 约束 类型。
simplex[5] theta; // sum(theta) = 1
ordered[5] o; // o[1] < ... < o[5]
positive_ordered[5] p;
corr_matrix[5] C; // 对称和
cov_matrix[5] Sigma; // 正定的关于Stan的更多信息
随时关注您喜欢的主题
所有典型的判断和循环语句也都可用。
if/then/else
for (i in 1:I)
while (i < I)有两种修改 后验的方法。
y ~ normal(0, 1);
target += normal_lpdf(y | 0, 1);
# 新版本的Stan中已弃用:
increment_log_posterior(log_normal(y, 0, 1))而且许多采样语句都是 矢量化的。
parameters {
real mu[N];
real<lower=0> sigma[N];
}
model {
// for (n in 1:N)
// y[n] ~ normal(mu[n], sigma[n]);
y ~ normal(mu, sigma); // 向量化版本
}贝叶斯方法
概率是 认知的。例如, 约翰·斯图亚特·米尔 (John Stuart Mill)说:
事件的概率不是事件本身,而是我们或其他人期望发生的情况的程度。每个事件本身都是确定的,不是可能的;如果我们全部了解,我们应该或者肯定地知道它会发生,或者它不会。
对我们来说,概率表示对它发生的期望程度。
概率可以量化不确定性。
Stan的贝叶斯示例:重复试验模型
我们解决一个小例子,其中的目标是给定从伯努利分布中抽取的随机样本,以估计缺失参数的后验分布 ![]() (成功的机会)。
(成功的机会)。
步骤1:问题定义
在此示例中,我们将考虑以下结构:
- 数据:
 ,试用次数。
,试用次数。 ,即试验n的结果 (已知的建模数据)。
,即试验n的结果 (已知的建模数据)。
- 参数:
- 先验分布

- 概率

- 后验分布
步骤2:Stan
我们创建Stan程序,我们将从R中调用它。
data {
int<lower=0> N; // 试验次数
int<lower=0, upper=1> y[N]; // 试验成功
}
model {
theta ~ uniform(0, 1); // 先验
y ~ bernoulli(theta); // 似然
}步骤3:数据
在这种情况下,我们将使用示例随机模拟一个随机样本,而不是使用给定的数据集。
# 生成数据
y = rbinom(N, 1, 0.3)
y## [1] 0 0 0 1 1 0 0 0 0 0 1 0 0 1 0 0 0 0 0 1根据数据计算 MLE作为样本均值:
sum(y) / N## [1] 0.25步骤4:rstan使用贝叶斯后验估计
最后一步是使用R中的Stan获得我们的估算值。
##
## SAMPLING FOR MODEL '6dcfbccbf2f063595ccc9b93f383e221' NOW (CHAIN 1).
## Chain 1:
## Chain 1: Gradient evaluation took 7e-06 seconds
## Chain 1: 1000 transitions using 10 leapfrog steps per transition would take 0.07 seconds.
## Chain 1: Adjust your expectations accordingly!
## Chain 1:
## Chain 1:
## Chain 1: Iteration: 1 / 5000 [ 0%] (Warmup)
## Chain 1: Iteration: 500 / 5000 [ 10%] (Warmup)
## Chain 1: Iteration: 1000 / 5000 [ 20%] (Warmup)
## Chain 1: Iteration: 1500 / 5000 [ 30%] (Warmup)
## Chain 1: Iteration: 2000 / 5000 [ 40%] (Warmup)
## Chain 1: Iteration: 2500 / 5000 [ 50%] (Warmup)
## Chain 1: Iteration: 2501 / 5000 [ 50%] (Sampling)
## Chain 1: Iteration: 3000 / 5000 [ 60%] (Sampling)
## Chain 1: Iteration: 3500 / 5000 [ 70%] (Sampling)
## Chain 1: Iteration: 4000 / 5000 [ 80%] (Sampling)
## Chain 1: Iteration: 4500 / 5000 [ 90%] (Sampling)
## Chain 1: Iteration: 5000 / 5000 [100%] (Sampling)
## Chain 1:
## Chain 1: Elapsed Time: 0.012914 seconds (Warm-up)
## Chain 1: 0.013376 seconds (Sampling)
## Chain 1: 0.02629 seconds (Total)
## Chain 1:
...
## SAMPLING FOR MODEL '6dcfbccbf2f063595ccc9b93f383e221' NOW (CHAIN 4).
## Chain 4:
## Chain 4: Gradient evaluation took 3e-06 seconds
## Chain 4: 1000 transitions using 10 leapfrog steps per transition would take 0.03 seconds.
## Chain 4: Adjust your expectations accordingly!
## Chain 4:
## Chain 4:
## Chain 4: Iteration: 1 / 5000 [ 0%] (Warmup)
## Chain 4: Iteration: 500 / 5000 [ 10%] (Warmup)
## Chain 4: Iteration: 1000 / 5000 [ 20%] (Warmup)
## Chain 4: Iteration: 1500 / 5000 [ 30%] (Warmup)
## Chain 4: Iteration: 2000 / 5000 [ 40%] (Warmup)
## Chain 4: Iteration: 2500 / 5000 [ 50%] (Warmup)
## Chain 4: Iteration: 2501 / 5000 [ 50%] (Sampling)
## Chain 4: Iteration: 3000 / 5000 [ 60%] (Sampling)
## Chain 4: Iteration: 3500 / 5000 [ 70%] (Sampling)
## Chain 4: Iteration: 4000 / 5000 [ 80%] (Sampling)
## Chain 4: Iteration: 4500 / 5000 [ 90%] (Sampling)
## Chain 4: Iteration: 5000 / 5000 [100%] (Sampling)
## Chain 4:
## Chain 4: Elapsed Time: 0.012823 seconds (Warm-up)
## Chain 4: 0.014169 seconds (Sampling)
## Chain 4: 0.026992 seconds (Total)
## Chain 4:print(fit, probs=c(0.1, 0.9))## Inference for Stan model: 6dcfbccbf2f063595ccc9b93f383e221.
## 4 chains, each with iter=5000; warmup=2500; thin=1;
## post-warmup draws per chain=2500, total post-warmup draws=10000.
##
## mean se_mean sd 10% 90% n_eff Rhat
## theta 0.27 0.00 0.09 0.16 0.39 3821 1
## lp__ -13.40 0.01 0.73 -14.25 -12.90 3998 1
## # 提取后验抽样
# 计算后均值(估计)
mean(theta_draws)## [1] 0.2715866# 计算后验区间
## 10% 90%
## 0.1569165 0.3934832 ggplot(theta_draws_df, aes(x=theta)) +
geom_histogram(bins=20, color="gray")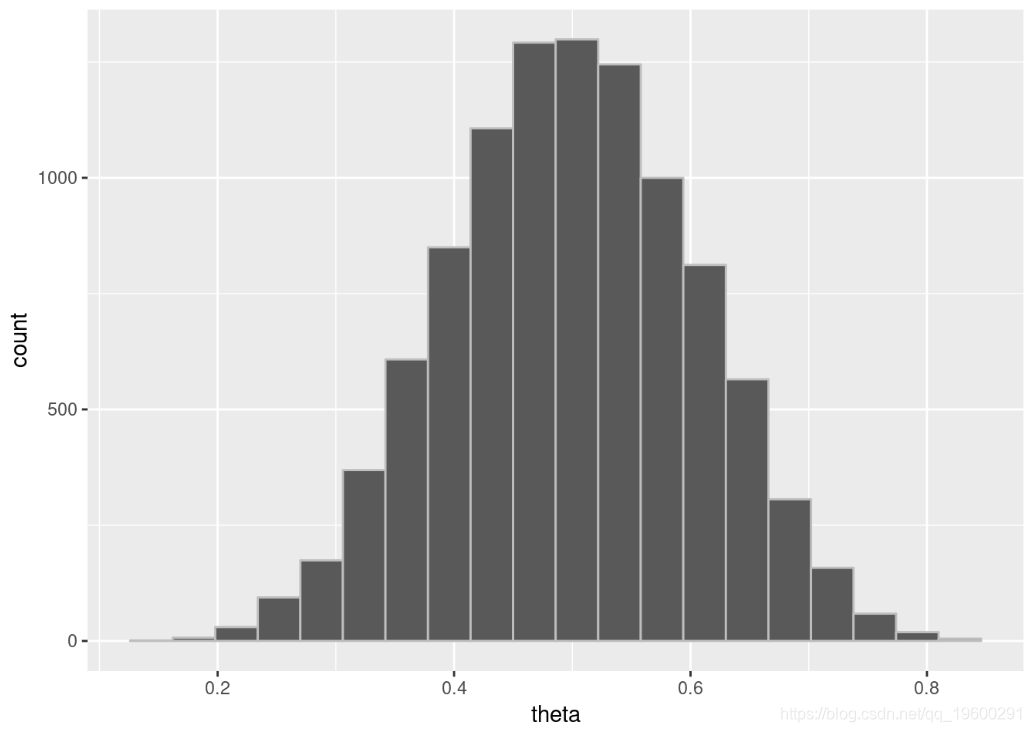
RStan:MAP,MLE
Stan的估算优化;两种观点:
- 最大后验估计(MAP)。
- 最大似然估计(MLE)。
optimizing(model, data=c("N", "y"))
## $par
## theta
## 0.4
##
## $value
## [1] -3.4
##
## $return_code
## [1] 0种群竞争模型 —Lotka-Volterra模型
- 洛特卡(Lotka,1925)和沃尔泰拉(Volterra,1926)制定了参数化微分方程,描述了食肉动物和猎物的竞争种群。
- 完整的贝叶斯推断可用于估计未来(或过去)的种群数量。
- Stan用于对统计模型进行编码并执行完整的贝叶斯推理,以解决从噪声数据中推断参数的逆问题。
在此示例中,我们希望根据公司每年收集的毛皮数量,将模型拟合到1900年至1920年之间各自种群的加拿大猫科食肉动物和野兔猎物。
数学模型
我们表示U(t)和V(t)作为猎物和捕食者种群数量 分别。与它们相关的微分方程为:
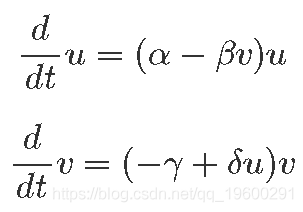
这里:
- α:猎物增长速度。
- β:捕食引起的猎物减少速度。
- γ:自然的捕食者减少速度。
- δ:捕食者从捕食中增长速度。
stan中的Lotka-Volterra
real[] dz_dt(data real t, // 时间
real[] z, // 系统状态
real[] theta, // 参数
data real[] x_r, // 数值数据
data int[] x_i) // 整数数据
{
real u = z[1]; // 提取状态
real v = z[2];观察到已知变量:
 :表示在时间
:表示在时间  的
的 物种数量
物种数量
必须推断未知变量):
- 初始状态:
 :k的初始物种数量。
:k的初始物种数量。 - 后续状态
 :在时间t的物种数量k。
:在时间t的物种数量k。 - 参量
 。
。
假设误差是成比例的(而不是相加的):

等效:

与

建立模型
已知常数和观测数据的变量。
data {
int<lower = 0> N; // 数量测量
real ts[N]; // 测量次数>0
real y0[2]; // 初始数量
real<lower=0> y[N,2]; // 后续数量
}未知参数的变量。
parameters {
real<lower=0> theta[4]; // alpha, beta, gamma, delta
real<lower=0> z0[2]; // 原始种群
real<lower=0> sigma[2]; // 预测误差
}先验分布和概率。
model {
// 先验
sigma ~ lognormal(0, 0.5);
theta[{1, 3}] ~ normal(1, 0.5);
// 似然(对数正态)
for (k in 1:2) {
y0[k] ~ lognormal(log(z0[k]), sigma[k]);我们必须为预测的总体定义变量 :
- 初始种群(
z0)。 - 初始时间(
0.0),时间(ts)。 - 参数(
theta)。 - 最大迭代次数(
1e3)。
Lotka-Volterra参数估计
print(fit, c("theta", "sigma"), probs=c(0.1, 0.5, 0.9))获得结果:
mean se_mean sd 10% 50% 90% n_eff Rhat
## theta[1] 0.55 0 0.07 0.46 0.54 0.64 1168 1
## theta[2] 0.03 0 0.00 0.02 0.03 0.03 1305 1
## theta[3] 0.80 0 0.10 0.68 0.80 0.94 1117 1
## theta[4] 0.02 0 0.00 0.02 0.02 0.03 1230 1
## sigma[1] 0.29 0 0.05 0.23 0.28 0.36 2673 1
## sigma[2] 0.29 0 0.06 0.23 0.29 0.37 2821 1分析所得结果:
- Rhat接近1表示收敛;n_eff是有效样本大小。
- 10%,后验分位数;例如
 。
。 - 后验均值是贝叶斯点估计:α=0.55。
- 后验平均估计的标准误为0。
- α的后验标准偏差为0.07。
可下载资源
关于作者
Kaizong Ye是拓端研究室(TRL)的研究员。在此对他对本文所作的贡献表示诚挚感谢,他在上海财经大学完成了统计学专业的硕士学位,专注人工智能领域。擅长Python.Matlab仿真、视觉处理、神经网络、数据分析。
本文借鉴了作者最近为《R语言数据分析挖掘必知必会 》课堂做的准备。
非常感谢您阅读本文,如需帮助请联系我们!
 R语言广义加性模型GAM、Tweedie分布的SaaS客户生命周期价值CLV预测研究——非线性关系捕捉与异方差性适配创新|附代码数据
R语言广义加性模型GAM、Tweedie分布的SaaS客户生命周期价值CLV预测研究——非线性关系捕捉与异方差性适配创新|附代码数据 R语言优化沪深股票投资组合:粒子群优化算法PSO、重要性采样、均值-方差模型、梯度下降法|附代码数据
R语言优化沪深股票投资组合:粒子群优化算法PSO、重要性采样、均值-方差模型、梯度下降法|附代码数据 专题:Python实现贝叶斯线性回归与MCMC采样数据可视化分析2实例|附代码数据
专题:Python实现贝叶斯线性回归与MCMC采样数据可视化分析2实例|附代码数据 【视频讲解】R语言海七鳃鳗性别比分析:JAGS贝叶斯分层逻辑回归MCMC采样模型应用
【视频讲解】R语言海七鳃鳗性别比分析:JAGS贝叶斯分层逻辑回归MCMC采样模型应用