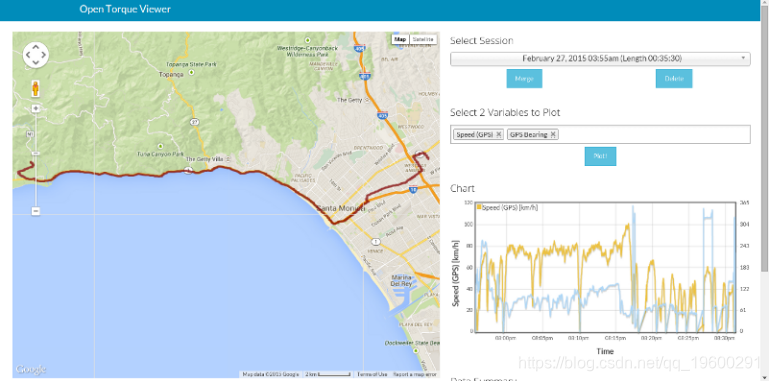
我一直在使用Open Torque Viewer结合Torque App和基本的OBDII蓝牙传感器来记录我过去一个半月的汽车传感器数据。 这是我学到的一些东西:
轻松进入汽车的ECU非常简单
自1996年以来,在北美销售的所有汽车都必须支持带有标准化数据链接连接器和参数ID的OBD-II诊断。 例如,这对于州规定的排放检查很有用。
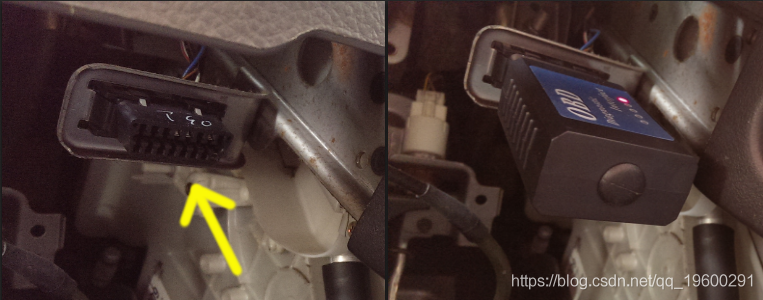

将蓝牙OBDII设备连接到端口,下载Torque应用程序,设置Open Torque Viewer ,您将能够记录每个行程数据并将其显示在漂亮的界面内。
城市mpg估算值很高
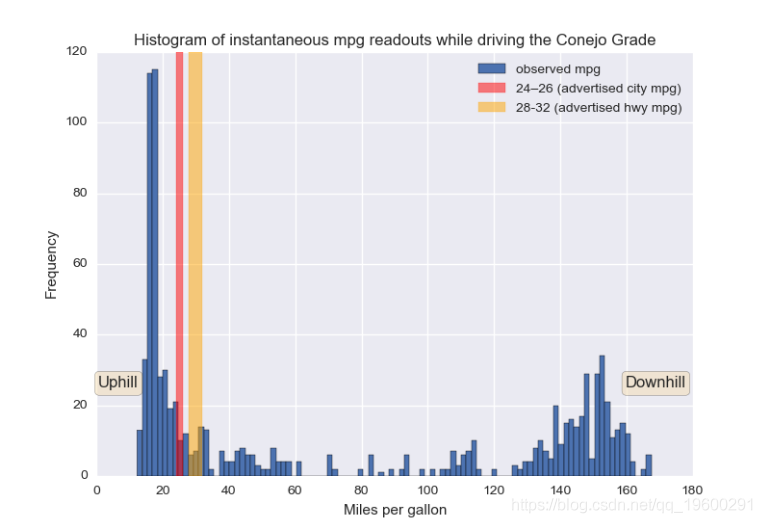
扭矩可在驾驶时提供瞬时mpg数据的读数。 我对该数据进行了直方图处理,并将其与下表中的广告值进行了比较。
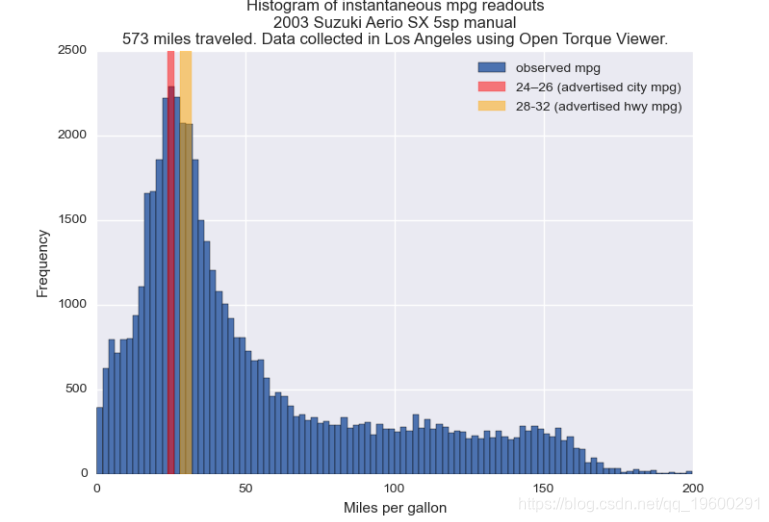

我的驾驶相当适合“城市”配置文件(即使我通常在“高速公路”上)。
我在上坡地区的平均油耗为17.77 mpg,下坡时的平均油耗为112.92。 这是Conejo成绩记录的瞬时mpg测量值的直方图:
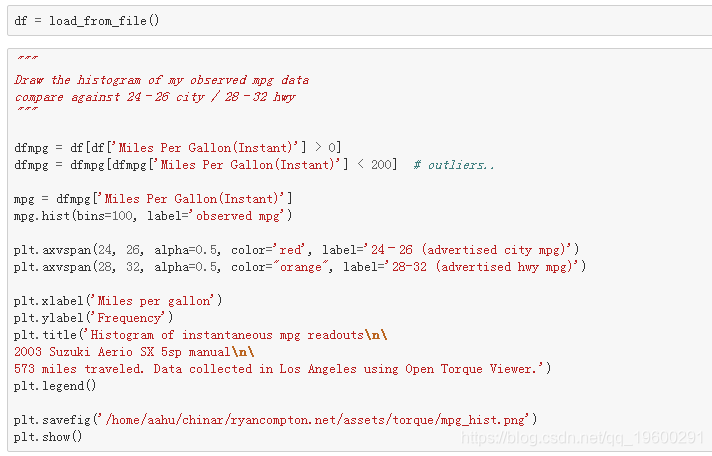
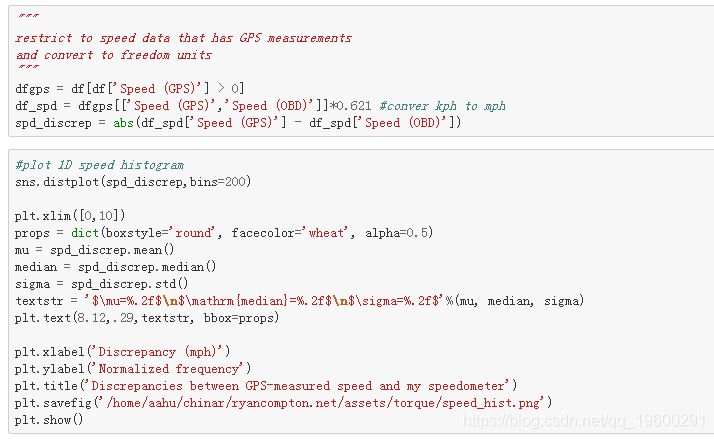
部分代码片段:


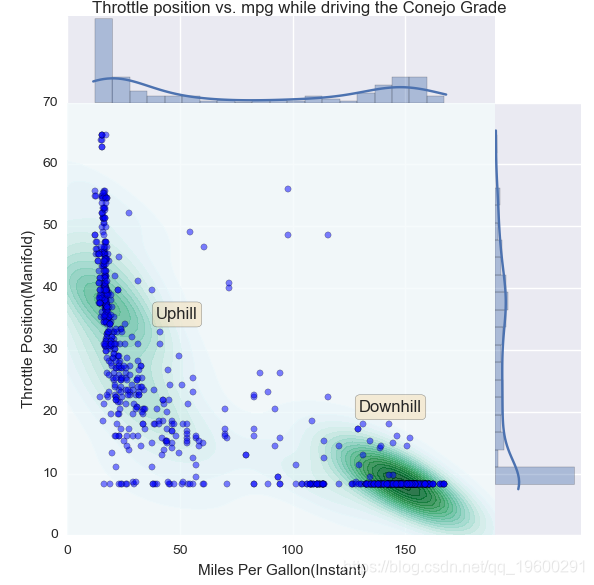
扭矩也会记录油门位置。

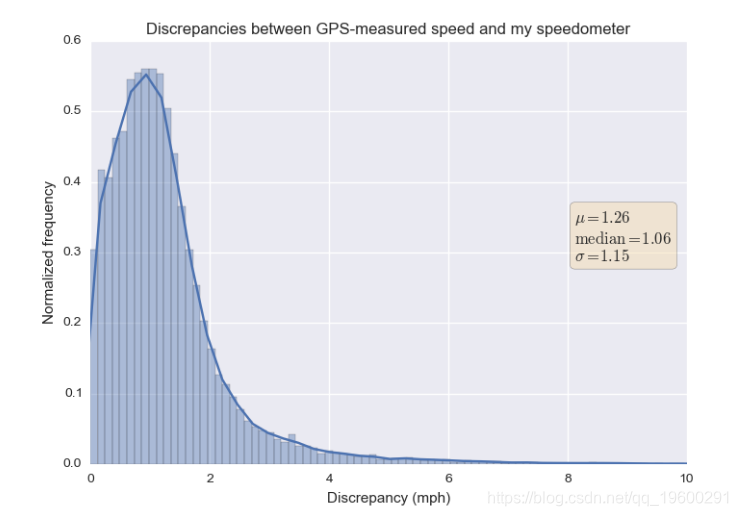
我的车速表是准确的
这是我的GPS测量的速度与速度计报告的数据之间的差异图。


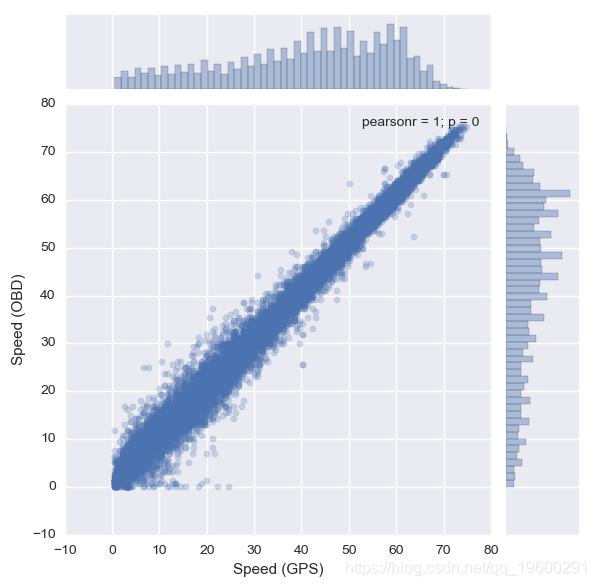

这是一张显示协议在更高速度下如何变得更好的图:
备注

非常感谢您阅读本文,有任何问题请在下面留言!
1
1
关于作者
Weilong Zhang是拓端研究室(TRL)的研究员。
 Python熵权法、CUSUM与PSO-BP组合模型在网球竞技动量实时监控与胜负预测研究|附数据代码
Python熵权法、CUSUM与PSO-BP组合模型在网球竞技动量实时监控与胜负预测研究|附数据代码 Python用XGBoost、梯度提升树、Lasso与极端随机树ETR功率变换器磁芯损耗建模及SLSQP优化 | 附数据代码
Python用XGBoost、梯度提升树、Lasso与极端随机树ETR功率变换器磁芯损耗建模及SLSQP优化 | 附数据代码 Python PyTorch用BERT-BiLSTM-FixedCRF中文医疗命名实体识别系统 | 附数据代码
Python PyTorch用BERT-BiLSTM-FixedCRF中文医疗命名实体识别系统 | 附数据代码 Python梯度提升树、SHAP与递归特征消除构建血栓风险分级预测模型|附代码数据
Python梯度提升树、SHAP与递归特征消除构建血栓风险分级预测模型|附代码数据