本文演示了如何训练一个简单的卷积神经网络 (CNN) 来对 图像进行分类。
Convolutional Neural Networks (ConvNets 或 CNNs)是一类神经网络,已被证明在图像识别和分类等领域非常有效。
可下载资源
与传统的多层感知器架构不同,它使用两个称为 convolution 和 pooling 的操作将图像简化为其基本特征,并使用这些特征来理解和分类图像。
CNN中的卷积架构通常被描述为“特征提取层”。
成功提取显著性(相关)特征是任何机器学习算法性能的关键,传统的机器学习模型依赖于输入特征,这些输入特征可能来自领域专家或基于计算特征提取技术。
CNN能够从原始数据中自动学习到对特定任务最有用的特征。因此,通常将CNN网络layers视为特征提取器。早期层(紧接着输入层之后的层)用于从原始数据
中提取低级特征,而后期层(通常是像多层感知机MLP中的全连接层)则使用这些特恒来预测连续的目标值或者类别标签。
对于某些类型的多层NNs,特别是深度卷积神经网络,通过以分层的方式组合低级特征以形成高级特征来构建所谓的特征层次(feature hierarchy)。
例如:在处理图像的时候,从较早的层中提取低级特征,例如边缘和斑点。这些特征组合在一起形成高级特征。这些高级特征可以形成更加复杂的形状,例如建
筑物、猫和狗等对象的一般轮廓。
CNN重要术语
卷积层
卷积是从输入图像中提取特征的第一层。
卷积通过使用输入数据的小方块学习图像特征来保留像素之间的关系。这是一个数学运算,需要两个输入,例如 image matrix 和 filter 或 kernel。然后图像矩阵的卷积乘以过滤器矩阵,称为 Feature Map。
使用不同滤波器对图像进行卷积可以通过应用滤波器来执行边缘检测、模糊和锐化等操作。
激活函数
由于卷积是线性操作,图像远非线性,非线性层通常直接放在卷积层之后,以引入 nonlinearity 激活图。
有几种类型的非线性操作,流行的是:
Sigmoid: sigmoid 非线性具有数学形式 f(x) = 1 / 1 + exp(-x)。它取一个实数值并将其标准化到 0 到 1 之间的范围内。
Tanh: Tanh 将实数值压缩到 [-1, 1] 范围内。
ReLU: 线性单元 (ReLU) 计算函数 ƒ(κ)=max (0,κ)。
Leaky ReL:Leaky ReLU 函数只不过是 ReLU 函数的改进版本。Leaky ReLU 就是为了解决这个问题而定义的。
Maxout:Maxout 激活是 ReLU 和leaky ReLU 函数的泛化。
ELU:Exponential Linear Unit 或简称ELU,也是Rectiufied Linear Unit (ReLU)的一种变体。与leaky relu和parametric ReLU函数不同,ELU不是直线,而是使用对数曲线来定义负值。

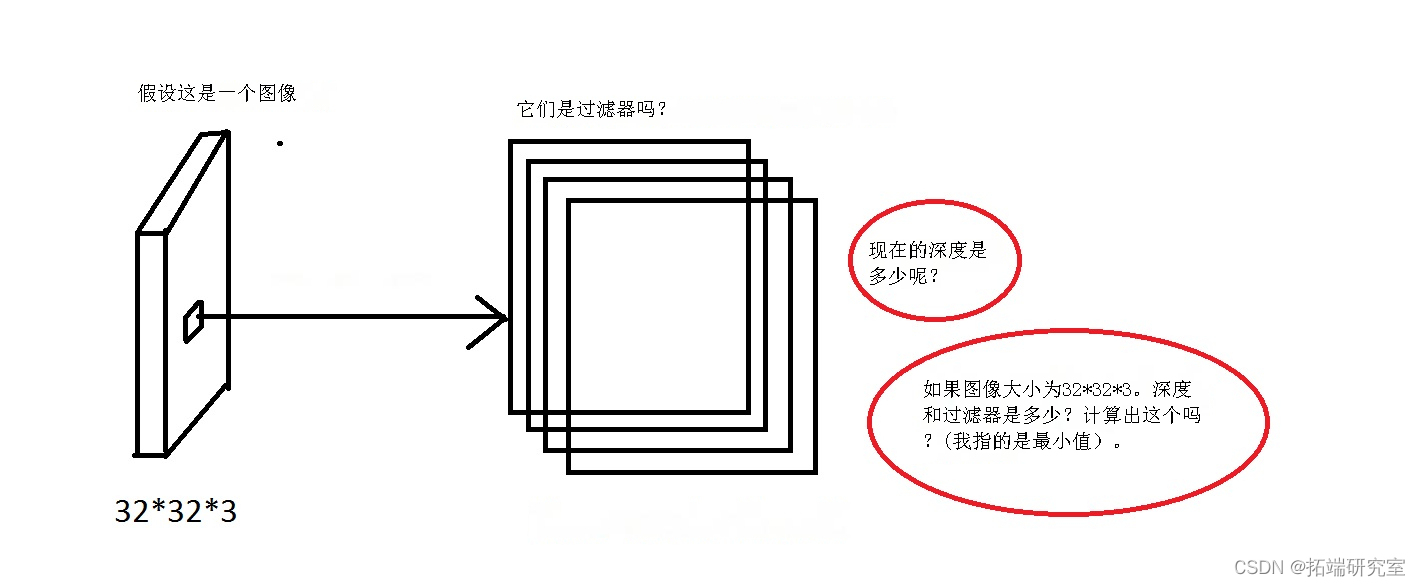
过滤器 | 核大小 | 过滤器数量
卷积使用a 从输入图像kernel 中提取某些 特征内容。核是一个矩阵,它 slide跨越图像并与输入相乘,从而以某种理想的方式增强输出。
在我们深入研究之前,核是一个权重矩阵,它与输入相乘以提取相关特征。核矩阵的维度是卷积的名称。例如,在 中 2D convolutions,核矩阵是 2D matrix。
一个普通的卷积层实际上由多个这样的过滤器组成。
步长
在输入矩阵上移动的像素数。当步长为 1 时,我们一次将过滤器移动到 1 个像素。当步长为 2 时,我们一次将过滤器移动到 2 个像素,依此类推。下图显示卷积将以 1 的步长工作。
填充
padding 意味着在数据的边界处提供额外的像素。有时过滤器不能完全适合输入图像,那么我们将使用填充。
我们有两个选择:
- 用零填充图片(零填充),使其适合
- 删除过滤器不适合的图像部分。这称为有效填充,它只保留图像的有效部分。

池化层
A pooling layer 是在卷积层之后添加的新层。具体来说,在对卷积层输出的特征图应用非线性(例如 ReLU)之后;
当图像太大时,池化层部分会减少参数的数量。 Spatial pooling 也称为 subsampling 或 downsampling 减少每个地图的维数但保留重要信息。
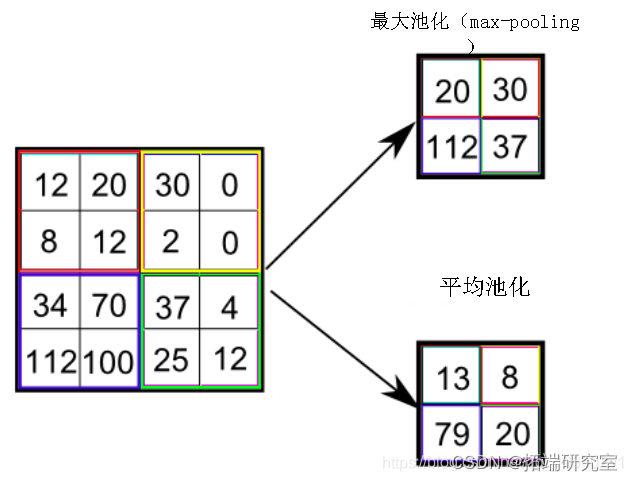
空间池可以有不同的类型:
- 最大池化
- 平均池化
Max pooling 从校正后的特征图中取最大元素。计算特征图上每个补丁的平均值称为 average pooling。特征图调用中每个补丁的所有元素的总和为 sum pooling.
随时关注您喜欢的主题
扁平化和密集层
Flattening 正在将数据转换为一维数组以将其输入到下一层。我们展平卷积层的输出以创建单个长特征向量。
Fully connected layer :传统的多层感知器结构。它的输入是一个一维向量,表示前几层的输出。它的输出是附在图像上的不同可能标签的概率列表(例如狗、猫、鸟)。接收概率最高的标签是分类决策。
下载数据和模型构建
该 数据集包含 60,000 张彩色图像 10 classes,每个类别有 6,000 张图像。数据集分为 50,000 张训练图像和 10,000 张测试图像。这些类是互斥的,它们之间没有重叠。
X\_train = X\_train/255
X\_test = X\_test/255
X\_train.shape, X\_test.shape


验证数据
为了验证数据集看起来是否正确,让我们绘制测试集中的第一张图像并显示图像。
plt.imshow(X_test\[0\])
y_test
构建 CNN 模型
下面的 8 行代码使用一个通用模式定义了卷积基:一堆 Conv2D 、MaxPooling2D 、 Dropout和Flatten 层 Dense 。
作为输入,a Conv2D 采用形状 (image_height, image_width, color_channels) 的张量。
Maxpool2D()通过对沿特征轴的每个维度在 (2,2)Downsamples 定义的窗口上取最大值来对输入表示进行 分层 。
Dropout() 用于在训练阶段的每次更新时将隐藏单元的出边随机设置为 0。
Flatten() 用于将数据转换为一维数组,用于输入到下一层。
Dense() 层是具有 128 个神经元的常规深度连接神经网络层。输出层也是一个密集层,有 10 个神经元用于 10 个类。
使用的激活函数是 softmax。Softmax 将实数向量转换为分类概率向量。输出向量的元素在 (0, 1) 范围内并且总和为 1。
model.add(Flatten())
model.add(Dense(units = 128, activation='relu'))
model.add(Dense(units=10, activation='softmax'))
model.summary()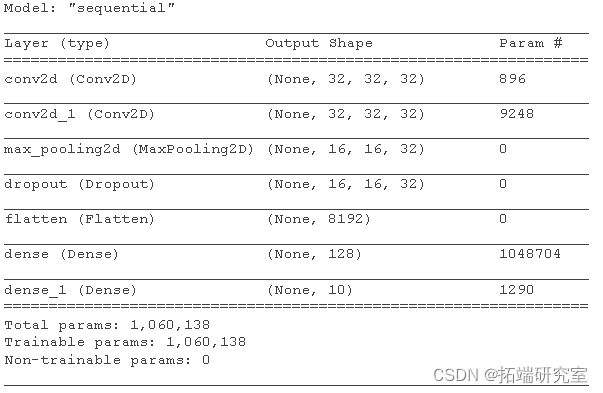
编译和训练模型
这是 compiling 模型和 fitting 训练数据。我们将使用 10 epochs 来训练模型。一个时期是对所提供的整个数据的迭代。 是在每个 epoch 结束时validation_data 评估和任何模型指标的 数据。loss模型不会根据这些数据进行训练。由于指标 = ['sparse_categorical_accuracy'] 模型将基于 accuracy.
history = model.fit(X_train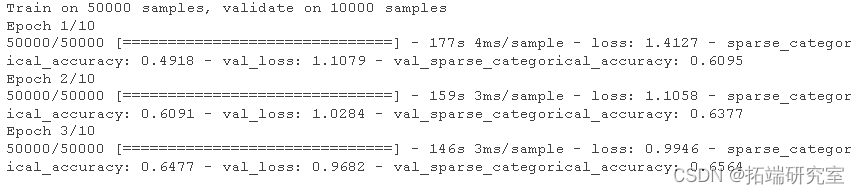
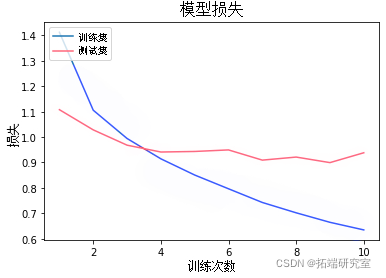
我们现在将绘制 model accuracy and model loss。在模型准确度中,我们将绘制训练准确度和验证准确度,在模型损失中,我们将绘制训练损失和验证损失。
# 绘制训练和验证的准确值
epoch_range = range(1, 11)
plt.plot(epoch\_range, history.history\['sparse\_categorical_accuracy'\])
# 绘制训练和验证的损失值
plt.plot(epoch_range, history.history\['loss'\])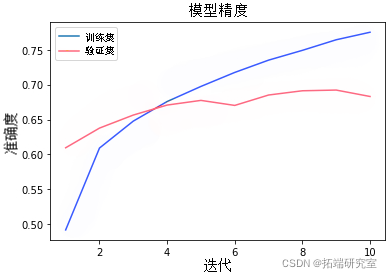
y\_pred = model.predict\_classes(X_test)
confusion_matrix
mat
plot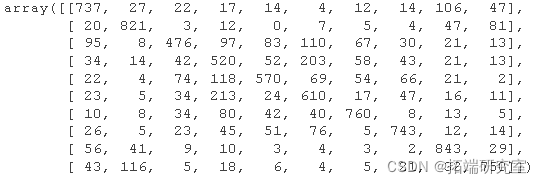

结论:
在本教程中,我们训练了简单的卷积神经网络 (CNN) 来对 图像进行分类。从学习曲线图中我们观察到,在 3 个 epoch 之后,验证准确度低于训练集准确度,即我们的模型是过拟合,这意味着我们增加了模型的复杂性。还使用混淆矩阵评估模型。观察到该模型对鸟、猫、鹿、狗等标签的预测精度较低。
可下载资源
关于作者
Kaizong Ye是拓端研究室(TRL)的研究员。Kaizong Ye是拓端研究室(TRL)的研究员。在此对他对本文所作的贡献表示诚挚感谢,他在上海财经大学完成了统计学专业的硕士学位,专注人工智能领域。擅长Python.Matlab仿真、视觉处理、神经网络、数据分析。
本文借鉴了作者最近为《R语言数据分析挖掘必知必会 》课堂做的准备。
非常感谢您阅读本文,如需帮助请联系我们!
 MATLAB奥运会奖牌预测研究 —CNN神经网络、逻辑回归、Liang-Kleeman信息流、多元回归及随机森林模型的因果关联与概率预测|附代码数据
MATLAB奥运会奖牌预测研究 —CNN神经网络、逻辑回归、Liang-Kleeman信息流、多元回归及随机森林模型的因果关联与概率预测|附代码数据 Python主题建模、情感分析酒店评论、工商银行手机APP用户评论:MLP、LSTM、CNN、LDA、SVM、随机森林、朴素贝叶斯
Python主题建模、情感分析酒店评论、工商银行手机APP用户评论:MLP、LSTM、CNN、LDA、SVM、随机森林、朴素贝叶斯 TCN时序卷积网络、CNN、RNN、LSTM、GRU神经网络工业设备运行监测、航空客运量时间序列数据集预测可视化|附代码数据
TCN时序卷积网络、CNN、RNN、LSTM、GRU神经网络工业设备运行监测、航空客运量时间序列数据集预测可视化|附代码数据 Python TensorFlow的CNN-LSTM-GRU集成模型在边缘物联网数据IoT电动汽车充电站入侵检测应用
Python TensorFlow的CNN-LSTM-GRU集成模型在边缘物联网数据IoT电动汽车充电站入侵检测应用