如今,几乎我们使用的每个应用程序中都有大量数据- 听音乐, 浏览朋友的图像,或者 观看新的预告片
对于单个用户来说这不是问题。但是,想象一下同时处理成千上万的请求(如果不是上百万)具有大数据的请求。必须以某种方式减少这些数据流,以便我们能够物理上将其提供给用户-这就是数据压缩的开始。
可下载资源
压缩技术很多,它们的用法和兼容性也各不相同。
压缩有两种主要类型:
- 无损:即使我们不太“精打细算”,数据完整性和准确性也是首选
- 有损:数据完整性和准确性并不像我们提供服务的速度那么重要-想象一下实时视频传输,其中“实时”传输比拥有高质量视频更为重要
例如,使用Autoencoders,我们可以分解此图像并将其表示为下面的32矢量代码。使用它,我们可以重建图像。
当然,这是有损压缩的一个示例,因为我们已经丢失了很多信息。
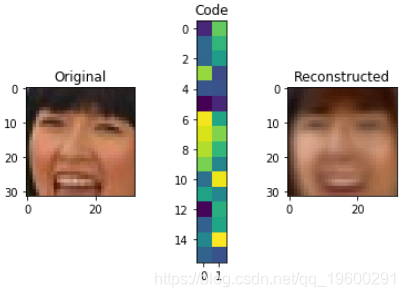
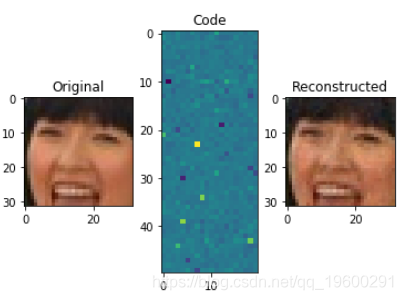
不过,我们可以使用完全相同的技术,通过为表示分配更多的空间来更精确地做到这一点:
def decode_image_from_raw_bytes(raw_bytes):
img = cv2.imdecode(np.asarray(bytearray(raw_bytes), dtype=np.uint8), 1)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
return img另一个是实际加载数据集并使其适应我们的需求:
实施
我们的数据X以3D矩阵的形式存在于矩阵中,这是RGB图像的默认表示形式。通过提供三个矩阵-红色,绿色和蓝色,这三个矩阵的组合产生了图像颜色。
这些图像的每个像素将具有较大的值,范围从0到255。通常,在机器学习中,我们倾向于使值较小,并以0为中心,因为这有助于我们的模型更快地训练并获得更好的结果,因此让我们对图像进行归一化:
X = X.astype('float32') / 255.0 - 0.5
现在,如果我们测试X数组的最小值和最大值,它将是-.5和.5,您可以验证:
print(X.max(), X.min())
0.5 -0.5
为了能够看到图像,让我们创建一个show_image函数。0.5由于像素值不能为负,它将添加到图像中:
现在,让我们快速浏览一下我们的数据:
show_image(X[6])
现在让我们将数据分为训练和测试集:
sklearn train_test_split()函数能够通过给它测试比率来分割数据,其余的当然是训练量。的random_state,你会看到很多机器学习,用来产生相同的结果,不管你有多少次运行代码。
现在该模型了:
此函数将image_shape(图像尺寸)和code_size(输出表示的大小)作为参数。
从逻辑上讲,该值越小code_size,图像将压缩得越多,但是保存的功能就越少,并且所复制的图像与原始图像的差异会更大。
由于网络体系结构不接受3D矩阵,因此该Flatten层的工作是将(32,32,3)矩阵展平为一维数组(3072)。
现在,将它们连接在一起并开始我们的模型:
之后,我们通过Model使用inp和reconstruction参数创建一个链接它们,并使用adamax优化器和mse损失函数对其进行编译。
在这里编译模型意味着定义其目标以及达到目标的方式。在我们的上下文中,目标是最小化,mse并通过使用优化程序来达到此目的-从本质上讲,这是一种经过调整的算法,可以找到全局最小值。
结果:
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
input_6 (InputLayer) (None, 32, 32, 3) 0
_________________________________________________________________
sequential_3 (Sequential) (None, 32) 98336
_________________________________________________________________
sequential_4 (Sequential) (None, 32, 32, 3) 101376
=================================================================
Total params: 199,712
Trainable params: 199,712
Non-trainable params: 0
_________________________________________________________________在这里我们可以看到输入是32,32,3。
隐藏层是32 ,您看到的解码器输出是(32,32,3)。
模型:
在本例中,我们将比较构造的图像和原始图像,因此x和y都等于X_train。理想情况下,输入等于输出。
该epochs变量定义多少次,我们要训练数据通过模型过去了,validation_data是我们用来评估训练后的模型验证组:
Train on 11828 samples, validate on 1315 samples
Epoch 1/20
11828/11828 [==============================] - 3s 272us/step - loss: 0.0128 - val_loss: 0.0087
Epoch 2/20
11828/11828 [==============================] - 3s 227us/step - loss: 0.0078 - val_loss: 0.0071
.
.
.
Epoch 20/20
11828/11828 [==============================] - 3s 237us/step - loss: 0.0067 - val_loss: 0.0066我们可以将 损失可视化,以获得 概述。
plt.plot(history.history['loss'])
plt.plot(history.history['val_loss'])
plt.title('model loss')
plt.ylabel('loss')
plt.xlabel('epoch')
plt.legend(['train', 'test'], loc='upper left')
plt.show()我们可以看到,在第三个时期之后,损失没有明显的进展。
这也可能导致模型过度拟合,从而使其在训练和测试数据集之外的新数据上的表现不佳。
现在,最令人期待的部分-让我们可视化结果:
def visualize(img,encoder,decoder):
”“绘制原始,编码和解码的图像”“”
#img [None]的形状为(1、32、32、3),与模型输入相同
code = encoder.predict(img[None])[0]
reco = decoder.predict(code[None])[0]
plt.subplot(1,3,1)
plt.title("Original")
show_image(img)
plt.subplot(1,3,2)
plt.title("Code")
plt.imshow(code.reshape([code.shape[-1]//2,-1]))
plt.subplot(1,3,3)
plt.title("Reconstructed")
show_image(reco)
plt.show()
for i in range(5):
img = X_test[i]
visualize(img,encoder,decoder) 现在,让我们增加code_size至1000:
我们刚刚做的就是主成分分析(PCA),这是一种降维技术。我们可以通过生成较小的新功能来使用它来减小功能集的大小,但是仍然可以捕获重要信息。
主成分分析是 一种非常流行的用法。
图像去噪
另一种流行用法是去噪。让我们在图片中添加一些随机噪声:
def apply_gaussian_noise(X, sigma=0.1):
noise = np.random.normal(loc=0.0, scale=sigma, size=X.shape)
return X + noise在这里,我们从标准正态分布中添加了一些随机噪声,其大小为sigma,默认为0.1。
作为参考,这是具有不同sigma值的噪声的样子:
plt.subplot(1,4,1)
show_image(X_train[0])
plt.subplot(1,4,2)
show_image(apply_gaussian_noise(X_train[:1],sigma=0.01)[0])
plt.subplot(1,4,3)
show_image(apply_gaussian_noise(X_train[:1],sigma=0.1)[0])
plt.subplot(1,4,4)
show_image(apply_gaussian_noise(X_train[:1],sigma=0.5)[0])正如我们所看到的,几乎看不到图像的sigma增加0.5。我们将尝试从σ为的嘈杂图像中再生原始图像0.1。
我们将为此生成的模型与之前的模型相同,尽管我们将进行不同的训练。这次,我们将使用原始和相应的噪点图像对其进行训练:
现在让我们看一下模型结果:
结论
主成分分析,这是一种降维技术,图像去噪等。
可下载资源
关于作者
Kaizong Ye是拓端研究室(TRL)的研究员。在此对他对本文所作的贡献表示诚挚感谢,他在上海财经大学完成了统计学专业的硕士学位,专注人工智能领域。擅长Python.Matlab仿真、视觉处理、神经网络、数据分析。
本文借鉴了作者最近为《R语言数据分析挖掘必知必会 》课堂做的准备。
非常感谢您阅读本文,如需帮助请联系我们!
 Python对2028奥运奖牌预测分析:贝叶斯推断、梯度提升机GBM、时间序列、随机森林、二元分类教练效应量化研究
Python对2028奥运奖牌预测分析:贝叶斯推断、梯度提升机GBM、时间序列、随机森林、二元分类教练效应量化研究 视频讲解:BSNet模型(双边监督网络)结合医学CT影像与半监督学习SSL、卷积神经网络CNN的图像分割方案
视频讲解:BSNet模型(双边监督网络)结合医学CT影像与半监督学习SSL、卷积神经网络CNN的图像分割方案 视频讲解|Python图神经网络GNN原理与应用探索交通数据预测
视频讲解|Python图神经网络GNN原理与应用探索交通数据预测 专题|LSTM-XGBoost,ARMA-LSTM,LDA-LSTM黄金比特币价格混合预测,蔬菜包发放时空协同调配,知乎综艺评论情感时序洞察
专题|LSTM-XGBoost,ARMA-LSTM,LDA-LSTM黄金比特币价格混合预测,蔬菜包发放时空协同调配,知乎综艺评论情感时序洞察